
SOLICITUD
Robots humanoides
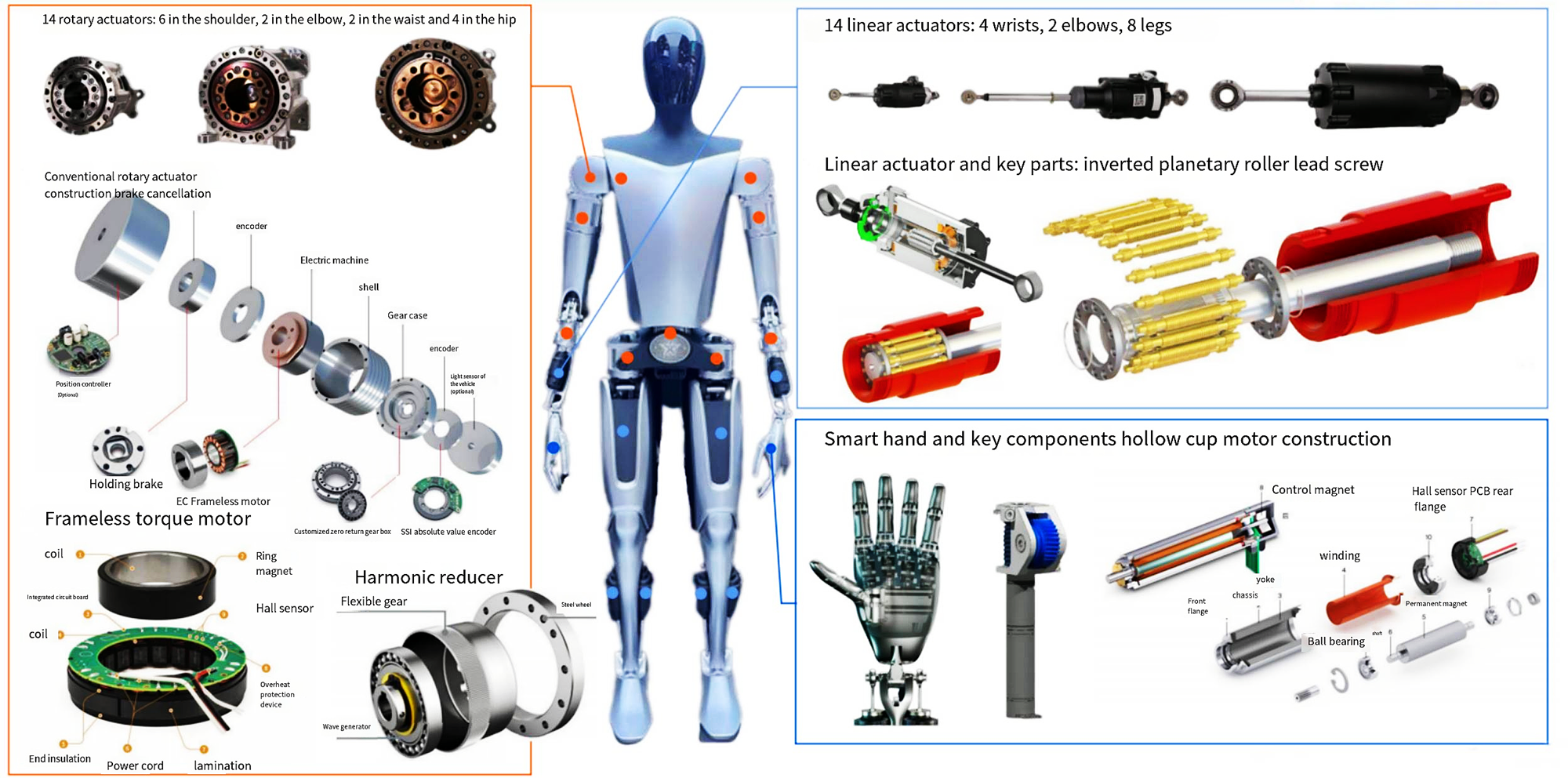
En los robots humanoides, la aplicación de motores sin núcleo, motores de torsión sin marco y reductores de engranajes planetarios es crucial, y desempeñan funciones únicas en diferentes sistemas y módulos funcionales. A continuación se muestra la descripción detallada de su aplicación:
Los motores sin núcleo se utilizan ampliamente en robots humanoides debido a su alta eficiencia y rápida respuesta, especialmente cuando se requiere alta precisión y control de alta velocidad.
Los motores de torsión sin marco se han utilizado ampliamente en partes de robots que requieren un gran par y estabilidad debido a sus ventajas de alto par, baja velocidad y gran par de salida.
Los reductores de engranajes planetarios mejoran el rendimiento de salida de los motores al aumentar el par y reducir la velocidad de rotación, y se utilizan en sistemas de movimiento múltiple de robots.
Aplicaciones
Brazo robótico:
La articulación de la muñeca utiliza un motor sin núcleo para lograr movimientos rápidos y flexibles, se utiliza un motor de torsión sin marco para el accionamiento del hombro para proporcionar una torsión potente y un reductor de engranajes planetarios aumenta la salida de torsión total en cada articulación.
Piernas biónicas:
Las articulaciones de la cadera y la rodilla utilizan motores de torsión sin marco para lograr una alta capacidad de carga, y los reductores de engranajes planetarios proporcionan funciones precisas de desaceleración y aumento de torsión.
Estas tecnologías de conducción funcionan en coordinación para permitir que los robots humanoides logren acciones complejas, movimientos suaves y operaciones de alta eficiencia, promoviendo la amplia aplicación de robots humanoides en diversos campos, incluida la automatización industrial, los robots de servicios y la asistencia médica.

Póngase en Contacto
*Respetamos su confidencialidad y toda la información está protegida.